松下伺服刚性参数设置,伺服马达如何调整增益刚性惯量
松下伺服怎么调节惯量比?
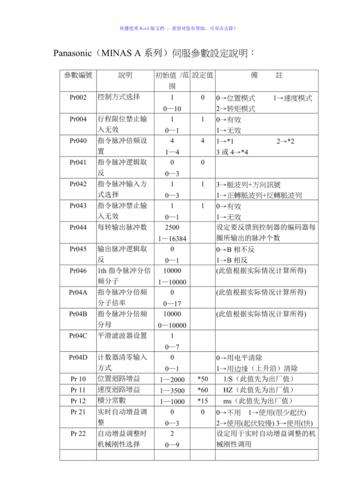
松下伺服的惯量比是通过调整伺服控制器参数实现的。具体步骤如下:1. 进入伺服控制器的参数设置界面,选择“惯量比”参数。2. 该参数可分为前向惯量比和反馈惯量比两个参数。前向惯量比用于调整伺服控制器对机械系统的前向惯量的补偿,反馈惯量比用于调整伺服控制器对机械系统的反馈惯量的补偿。根据实际需求,选择需要调整的惯量比参数。3. 通过实验或计算获得待调整的惯量比值。4. 将惯量比值输入到相应的参数设置中。5. 重新启动伺服系统,进行调试和验证。如果调整后的惯量比效果不理想,可以再次进行调整,直到满足要求为止。
 (图片来源网络,侵删)
(图片来源网络,侵删)您好,松下伺服驱动器通常通过参数调整惯量比。具体方法如下:
1. 进入参数设置模式。
2. 找到惯量比相关的参数,一般为JOG或JOG Speed参数。
 (图片来源网络,侵删)
(图片来源网络,侵删)3. 根据实际需求调整参数值,一般情况下,增加惯量比可以使伺服系统更快地响应负载变化,但也会增加震荡和振荡的风险,因此需要根据具体情况进行调整。
注意事项:
1. 在调整惯量比参数时,需要注意安全,确保机器不会因为误操作而受到损害。
 (图片来源网络,侵删)
(图片来源网络,侵删)2. 在调整惯量比参数后,需要进行充分的测试和验证,确保机器的性能和稳定性达到要求。
松下伺服前馈怎么调?
1、位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值由具体的伺服系统型号和负载情况确定。
2、位置前馈增益:设定位置环的前馈增益。设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。不需要很高的响应特性时,本参数通常设为0表示范围:0~100%
3、速度比例增益:设定速度调节器的比例增益。设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较大的值。
4、速度积分时间常数:设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较小的值。
5、速度反馈滤波因子:设定速度反馈低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡。数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。
松下伺服报160故障调什么参数?
松下伺服报160故障调惯量比和刚性参数:
要注意参数设置,过大的惯量比和刚性,都可能导致伺服过载报错的,而长期开启“自动增益调整”参数的话,伺服容易因为参数设置累积导致某项参数过高,导致Err 16.0报错。最简单的排查处理方法是将驱动器恢复出厂设置
松下伺服低惯量和高惯量的区别?
伺服电机高惯量和低惯量的区别主要表现在以下几个方面:
1.惯量大小不同:高惯量伺服电机的惯量比低惯量伺服电机大得多,这意味着它们的动态响应能力更强,可以更好地抵抗外界的干扰,从而提高系统的稳定性。
2.功率消耗不同:高惯量伺服电机的功率消耗比低惯量伺服电机大得多,这意味着它们的动态响应能力更强,可以更好地抵抗外界的干扰,从而提高系统的稳定性。
3.精度不同:高惯量伺服电机的精度比低惯量伺服电机高,因为它们的惯量更大,可以更好地抵抗外界的干扰,从而提高系统的精度。
4.价格不同:高惯量伺服电机的价格比低惯量伺服电机高,因为它们的制造成本更高。
到此,以上就是小编对于松下伺服电机的刚性怎么跟惯量比怎么调整的问题就介绍到这了,希望这4点解答对大家有用。
")
")

