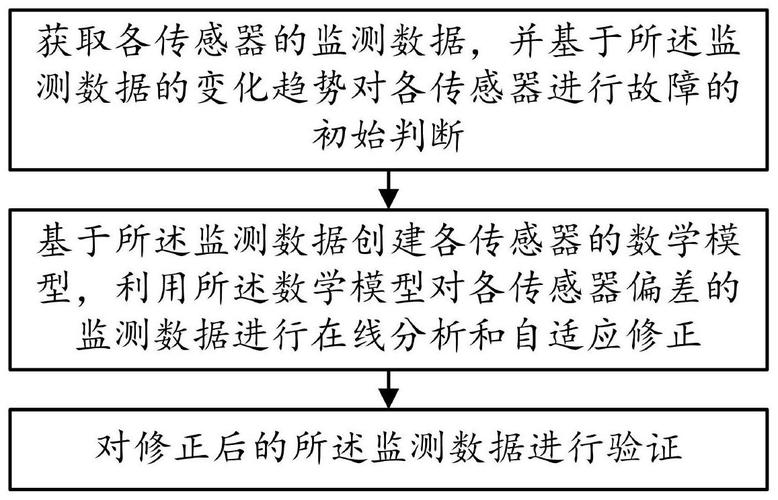
传感器数据与自适应计算的结合有哪些应用?
特斯拉acc和ap辅助驾驶的区别?
关于这个问题,特斯拉的ACC(自适应巡航控制)和AP(自动驾驶)是两个不同的辅助驾驶功能。
 (图片来源网络,侵删)
(图片来源网络,侵删)ACC是一种基本的自动驾驶功能,它使用雷达和摄像头等传感器来监测前方车辆,并自动调整车辆的速度,以保持与前车的安全距离。当前车减速时,ACC会自动减速,并在前车加速时自动加速。这个功能可以在高速公路上使用,对于长时间的高速巡航非常有用。
AP则是更高级的自动驾驶功能,它不仅可以自动控制车辆的速度,还可以进行车道保持和变道等操作。AP使用更多的传感器和计算能力来实现更高级的自动驾驶功能。它可以在适当的道路条件下,实现车辆的自动驾驶,减轻驾驶员的驾驶负担。
虽然ACC和AP都是特斯拉的辅助驾驶功能,但AP的功能更为全面和复杂,需要更高级的硬件和软件来支持。而ACC只是基本的自适应巡航控制,主要用于保持车辆与前车的安全距离。两者在功能和应用场景上有所区别。
 (图片来源网络,侵删)
(图片来源网络,侵删)特斯拉的ACC(自适应巡航控制)和AP(辅助驾驶)都具备自动驾驶功能,但它们之间存在一些关键差异。
速度和加速度控制:ACC只能根据前方车辆的速度和距离来控制车辆的速度,并在前方车辆减速或停车时自动减速或停车。然而,AP可以更精细地控制车辆的速度和加速度,可以实现更为平滑的加速、减速和转向。
自主性:ACC需要驾驶员将手放在方向盘上,以保持对车辆的控制。如果驾驶员没有保持对车辆的控制,ACC可能会停止工作。相比之下,AP可以在某些情况下自主转向和变道,而无需驾驶员的干预。
 (图片来源网络,侵删)
(图片来源网络,侵删)自动驾驶能力:AP具备更高级的自动驾驶能力。特斯拉的AP系统可以通过识别道路标志和车道线来自动转向,甚至可以在高速公路上实现完全自动驾驶。然而,ACC不具备这些功能,它只能根据前方车辆进行基本的自动驾驶。
传感器和算法:AP系统配备了各种传感器和摄像头,以监测周围环境,并使用人工智能算法来预测其他车辆和行人的行动。这使得AP系统在自动驾驶方面更为出色,但同时也带来了更高的价格。
综上所述,特斯拉的ACC和AP都具备自动驾驶功能,但AP在速度和加速度控制、自主性、自动驾驶能力和传感器方面表现更为出色。然而,AP也带来了更高的价格。
特斯拉ap辅助驾驶和ACC(自适应巡航控制)的主要区别在于AP可以更广泛地辅助驾驶,包括自动转向、自动变道和自动停车等。而ACC只能自动调节车速并保持安全的车距。
AP还拥有完整的自动驾驶能力,在一定条件下可以自动驾驶,而ACC不具备这种能力。另外,AP需要更多的传感器和计算资源来实现,因此成本较高。
没有区别,特斯拉AP可以理解为ACC的增强版。
特斯拉ap的意思是自动辅助驾驶。特斯拉AP的全称是Autopilot自动辅助驾驶,分为基本版自动辅助驾驶(BAP)和增强型自动辅助驾驶(EAP)。AP的基本功能包括:自适应巡航和车道保持。
蔚来pilot和nop的区别?
1 蔚来Pilot和NOP的区别在于功能和技术。2 蔚来Pilot是蔚来汽车的自动驾驶系统,具备高级驾驶辅助功能,可以实现自动巡航、自动泊车等功能。而NOP是一种新型的导航系统,通过智能算法和大数据分析,提供更准确、更智能的导航服务。3 蔚来Pilot相对于NOP来说,更注重车辆的自动驾驶能力,可以在高速公路上实现自动驾驶,提供更安全、更便捷的驾驶体验。而NOP则更注重导航的精准性和智能化,可以根据实时交通情况和用户的偏好,提供更优化的导航路线和服务。4 总的来说,蔚来Pilot和NOP在功能和技术上有所不同,选择哪个更好要根据个人需求和偏好来决定。如果更注重自动驾驶功能,可以选择蔚来Pilot;如果更注重导航的准确性和智能化,可以选择NOP。
到此,以上就是小编对于传感器数据与自适应计算的结合有哪些应用场景的问题就介绍到这了,希望这2点解答对大家有用。
")
")

